ROV
ROV
ISAAC SIM
Worksation installation
前置条件
- Ubuntu: 20.04
- Isaac Sim: 4.2.0
- CUDA Toolkits: 11.7
安装流程
从师兄那里拿到 isaac sim 4.2.0 的安装包并解压
CUDA 安装
- 安装 CUDA11.7,官方网站,推荐使用 runfile(local) 方式安装,其他两个似乎会在
apt install cuda时下载最新版本 - 运行
sudo sh cuda_11.7.0_515.43.04_linux.run时,查看/var/log/cuda-installer.log文件会有报错:解决方法是:在安装时取消[INFO]: Executing NVIDIA-Linux-x86_64-515.43.04.run --ui=none --no-questions --accept-license --disable-nouveau --no-cc-version-check --install-libglvnd 2>&1 [INFO]: Finished with code: 256 [ERROR]: Install of driver component failed. [ERROR]: Install of 515.43.04 failed, quittingdeiver选项,后期手动安装 - NVIDIA 官方网站下载主机显卡对应的驱动,下载拿到的是
.run程序,直接在控制台输入文件名./*.run运行即可。 sudo vim ~/.bashrc编辑启动文件,加入下面两行:export PATH=/usr/local/cuda-11.7/bin:$PATH export LD_LIBRARY_PATH=/usr/local/cuda-11.7/lib64:$LD_LIBRARY_PATHsource ~/.bashrc- 运行
nvcc -V,如有11.7版本输出,则可认为安装成功。重启电脑
- 安装 CUDA11.7,官方网站,推荐使用 runfile(local) 方式安装,其他两个似乎会在
Torch 环境安装 我采用的是 poetry 做环境管理(理论上 conda 也可以安装,参考官网)
poetry 环境是根据
.toml文件安装包的,而 Isaac-sim 只提供了environment.yml依赖文件,所以需要手动转成.toml文件我的
.toml文件如下[tool.poetry] name = "isaac-sim-4-2-0" version = "0.1.0" description = "" package-mode = false authors = ["<username>-linux <1399541701@qq.com>"] packages = [{include = "isaac_sim_4"}] [tool.poetry.dependencies] python = "^3.10" stable-baselines3 = "2.0.0" tensorboard = "2.11.0" tensorboard-plugin-wit = "1.8.1" protobuf = "3.20.3" torch = { version = "*", source = "torch" } torchvision = { version = "*", source = "torch" } torchaudio = { version = "*", source = "torch" } [[tool.poetry.source]] name = "torch" url = "https://download.pytorch.org/whl/cu117" priority = "explicit" [build-system] requires = ["poetry-core"] build-backend = "poetry.core.masonry.api"在
Isaac Sim安装文件根目录下(就是师兄给的那个压缩包)执行
poetry new <package name>创建项目执行
poetry init创建.toml文件修改
.toml文件执行
poetry install安装环境
运行 isaac sim
- 执行
poetry run isaac-sim.selector.sh,然后点击第一项Isaac Sim启动 - 等待一会儿后即可正常启动~首次加载会比较慢
- 执行
ISAAC LAB 安装
我的设置不适用于大多数人,因为执着于用 poetry 管理包环境(
- 编辑
~/.bashrc,设置 ISAASIM 的根目录
# Isaac Sim root directory
export ISAACSIM_PATH="${HOME}/.local/share/ov/pkg/isaac-sim-4.2.0"- 设置
python执行环境(问题分析)
这步有些复杂了。下面是官网要求的配置项:
# Isaac Sim python executable
export ISAACSIM_PYTHON_EXE="${ISAACSIM_PATH}/python.sh"但是这有个问题,这个启动脚本会构建一个纯粹的、自包含的运行环境。它会把 Isaac Sim 自己的内部库路径添加到 PYTHONPATH 中,而不知道 poetry 所生成的虚拟环境,无法读取到需要的包。所以会出现两个矛盾的情况:
- 如果用
${ISAACSIM_PYTHON_EXE}启动脚本,会无法读取 poetry 管理的包,提示no module ... - 如果用
poetry run python启动脚本,会丢失相关isaacsim的相关启动文件,提示no module 'isaacsim' found,所以应该采取一个两种兼顾的方法。
- 在
isaac sim根目录下设置run.sh脚本文件,设置如下,即:把 poetry 环境下安装的包和依赖,都一并传给${ISAACSIM_PATH}/python.sh作为启动文件,这样启动 python 脚本就既可以拿到isaacsim的启动文件,又能拿到 poetry 虚拟环境下的库文件。
#!/bin/bash
# 检查是否提供了脚本参数
if [ -z "$1" ]; then
echo "错误: 请提供一个要执行的 Python 脚本路径。"
echo "用法: ./run.sh path/to/your/script.py"
exit 1
fi
# 动态获取 Poetry 管理的 site-packages 目录路径
# 这使得脚本非常健壮,即使虚拟环境的位置改变也能工作
POETRY_SITEPACKAGES=$/home/<username>/data/isaac-sim-4.2.0/.venv/lib/python3.10/site-packages
# 设置 ISAACSIM_PATH,如果它没有被设置为环境变量的话
# 修改成你自己的 Isaac Sim 安装路径
ISAACSIM_ROOT=${ISAACSIM_PATH:-"/home/<username>/data/isaac-sim-4.2.0"}
echo "使用的 Poetry site-packages: $POETRY_SITEPACKAGES"
echo "使用的 Isaac Sim 根目录: $ISAACSIM_ROOT"
echo "-----------------------------------------------------"
# 使用 PYTHONPATH 环境变量来运行 Isaac Sim
# "$@" 会将所有传递给 run.sh 的参数原封不动地传递给 python.sh
PYTHONPATH=$POETRY_SITEPACKAGES $ISAACSIM_ROOT/python.sh "$@"同时,设置ISAACSIM_PYTHON_EXE环境变量为该脚本,即:在~/.bashrc文件内添加环境变量:
export ISAACSIM_PYTHON_EXE="${ISAACSIM_PATH}/run.sh"这样就可以按照官网所述正常运行脚本:
${ISAACSIM_PYTHON_EXE} ${ISAACSIM_PATH}/standalone_examples/api/omni.isaac.core/add_cubes.py- 克隆 IsaacLab 仓库,官网建议先 fork 再 clone
git clone git@github.com:<username>/IsaacLab.git
cd IsaacLab- 创建 Isaac Sim 符号链接
ln -s path_to_isaac_sim _isaac_sim
# For example: ln -s /home/nvidia/.local/share/ov/pkg/isaac-sim-4.2.0 _isaac_sim- 安装相关依赖
sudo apt install cmake build-essential- 安装需要的库,依旧想用 poetry 做包管理,所以修改如下所示:
详情
分析得非常到位!这是一个绝佳的问题,因为它直接触及了如何将一个规范的、通用的开发工具(Poetry)集成到一个有自己特定启动和环境逻辑的大型框架(Isaac Lab)中的核心。
答案是:是的,为了让 Poetry 无缝工作,您需要对 isaaclab.sh 脚本进行一些精准的、最小化的修改。
这个脚本设计得非常智能,但它的核心逻辑是围绕 Conda 和 Isaac Sim 原生二进制安装 这两种模式构建的,它本身并不认识 Poetry。
我们将通过修改脚本,让它能够识别并优先使用 Poetry 环境。
分析:isaaclab.sh 的关键冲突点
在您集成 Poetry 的工作流中,这个脚本有两大核心冲突点:
extract_python_exe()函数:这是最重要的函数。它负责决定“哪个 Python”将被用来执行命令(安装、测试、运行脚本等)。- 它会优先检查 Conda 环境 (
CONDA_PREFIX)。 - 如果不是 Conda,它会默认使用 Isaac Sim 的启动器
_isaac_sim/python.sh。 - 问题:它永远不会找到并返回您由 Poetry 创建的
.venv虚拟环境中的 Python 解释器。
- 它会优先检查 Conda 环境 (
-i, --install命令:- 这个命令会调用
extract_python_exe()来找到 Python,然后直接使用pip install。 - 问题:这会完全绕过 Poetry 的依赖解析和
poetry.lock文件,直接将库安装到 Isaac Sim 的原生环境或 Conda 环境中,从而破坏了使用 Poetry 的初衷。
- 这个命令会调用
修改策略:注入 Poetry 逻辑
我们的目标是在不破坏脚本原有功能的前提下,让它优先识别 Poetry 环境。我们将进行两处关键修改。
第 1 步:修改 extract_python_exe() 函数
这是最核心的修改。我们要在这个函数的最开始,加入一段逻辑来检测 Poetry 环境。如果检测到了,就直接返回 Poetry 环境中的 Python 路径,并结束函数;如果没有,就让函数继续执行它原来的 Conda 和原生逻辑。
找到 extract_python_exe() 函数,将其完全替换为以下内容:
# extract the python from isaacsim
extract_python_exe() {
# -- START: POETRY MODIFICATION --
# 1. Check if poetry is installed and a pyproject.toml exists in the project root.
if command -v poetry &> /dev/null && [ -f "${ISAACLAB_PATH}/pyproject.toml" ]; then
# 2. Ask poetry for the path to its virtual environment.
local poetry_venv_path
poetry_venv_path=$(poetry env info -p 2>/dev/null)
# 3. If a path is returned, construct the path to the python executable.
if [ -n "${poetry_venv_path}" ]; then
local poetry_python_exe="${poetry_venv_path}/bin/python"
# 4. If that python executable actually exists, use it.
if [ -f "${poetry_python_exe}" ]; then
echo "${poetry_python_exe}"
return 0
fi
fi
fi
# -- END: POETRY MODIFICATION --
# == ORIGINAL SCRIPT LOGIC (as a fallback) ==
# check if using conda
if ! [[ -z "${CONDA_PREFIX}" ]]; then
# use conda python
local python_exe=${CONDA_PREFIX}/bin/python
else
# use kit python
local python_exe=${ISAACLAB_PATH}/_isaac_sim/python.sh
if [ ! -f "${python_exe}" ]; then
# note: we need to check system python for cases such as docker
# inside docker, if user installed into system python, we need to use that
# otherwise, use the python from the kit
if [ $(python -m pip list | grep -c 'isaacsim-rl') -gt 0 ]; then
local python_exe=$(which python)
fi
fi
fi
# check if there is a python path available
if [ ! -f "${python_exe}" ]; then
echo -e "[ERROR] Unable to find any Python executable at path: '${python_exe}'" >&2
echo -e "\tThis could be due to the following reasons:" >&2
echo -e "\t1. Poetry/Conda environment is not activated." >&2
echo -e "\t2. Isaac Sim pip package 'isaacsim-rl' is not installed." >&2
echo -e "\t3. Python executable is not available at the default path: ${ISAACLAB_PATH}/_isaac_sim/python.sh" >&2
exit 1
fi
# return the result
echo ${python_exe}
}修改解析:
- 我们在函数开头增加了一个代码块。
- 它首先检查
poetry命令是否存在以及项目根目录下是否有pyproject.toml文件。 - 如果存在,它会调用
poetry env info -p来获取 Poetry 虚拟环境的路径。 - 如果成功获取,它就构建出该环境中
python解释器的完整路径,并将其作为结果返回,函数提前结束。 - 如果以上任何一步失败(比如你没有使用 Poetry),代码块会无声地跳过,脚本会继续执行下面原始的 Conda 和原生逻辑,保证了向后兼容性。
第 2 步:修改 -s, --sim 命令(非常重要)
仅仅修改 extract_python_exe 还不够。当你运行模拟器(-s)时,它调用的是 isaac-sim.sh,这是一个需要 PYTHONPATH 才能找到你的库的启动器。而 -p 选项是直接运行 Python,修改第一步就够了。
所以,我们需要为 -s 命令注入 PYTHONPATH。
找到 case "$1" in 里的 -s|--sim 代码块,将其完全替换为以下内容:
-s|--sim)
# run the simulator exe provided by isaacsim
isaacsim_exe=$(extract_isaacsim_exe)
echo "[INFO] Running isaac-sim from: ${isaacsim_exe}"
shift # past argument
# -- START: POETRY MODIFICATION for PYTHONPATH --
local poetry_site_packages=""
# Check if we are in a Poetry project
if command -v poetry &> /dev/null && [ -f "${ISAACLAB_PATH}/pyproject.toml" ]; then
local poetry_venv_path
poetry_venv_path=$(poetry env info -p 2>/dev/null)
# If a venv exists, find its site-packages directory
if [ -n "${poetry_venv_path}" ]; then
# Assuming python3.10 based on Isaac Sim version
poetry_site_packages="${poetry_venv_path}/lib/python3.10/site-packages"
echo "[INFO] Injecting Poetry site-packages into PYTHONPATH: ${poetry_site_packages}"
fi
fi
# Execute with PYTHONPATH if available, otherwise run normally
if [ -n "${poetry_site_packages}" ]; then
PYTHONPATH=${poetry_site_packages} ${isaacsim_exe} --ext-folder ${ISAACLAB_PATH}/source $@
else
${isaacsim_exe} --ext-folder ${ISAACLAB_PATH}/source $@
fi
# -- END: POETRY MODIFICATION --
# exit neatly
break
;;修改解析:
- 在执行
isaacsim_exe之前,我们加入了和之前类似的逻辑来检测 Poetry 环境。 - 如果检测到,它会构建出 Poetry 环境的
site-packages目录的路径。 - 然后,它使用
PYTHONPATH=${poetry_site_packages}的方式来启动模拟器,将我们的库路径临时注入进去。 - 如果没检测到 Poetry 环境,它就执行原始的命令,不注入任何东西。
您的全新工作流程
在完成了上述两处修改后,您的 Isaac Lab + Poetry 工作流将变得非常顺畅:
环境设置 (仅需一次):
- 在 Isaac Lab 项目根目录(
isaaclab.sh所在的目录)下,创建pyproject.toml文件。 - 运行
poetry env use /path/to/isaac-sim/kit/python/bin/python3关联环境。
- 在 Isaac Lab 项目根目录(
安装依赖:
- 不要再使用
./isaaclab.sh -i! - 使用标准的 Poetry 命令:
poetry install(安装pyproject.toml中的所有依赖) 或poetry add <package_name>(添加新依赖)。
- 不要再使用
运行 Python 脚本 (例如,训练任务):
./isaaclab.sh -p source/standalone/tutorials/01_assets.py- 脚本现在会使用 Poetry 环境中的 Python 和所有你安装的库来执行。
启动 Isaac Sim UI 并加载扩展:
./isaaclab.sh -s- 脚本现在会自动将 Poetry 环境的
site-packages注入PYTHONPATH,Isaac Sim 将能成功import你用 Poetry 安装的所有库。
通过这两处最小化的修改,您成功地让 isaaclab.sh 这个强大的工具脚本拥抱了 Poetry 的依赖管理能力,实现了两全其美。
双模机器人
启动操作
- 硬件连接
- 机身后部(摄像头方向为前方)最大的黑色水密件连接即视为 ROV 启动
- 灰色盒子(电力载波)通电启动,灰盒上红色指示灯应点亮
- PC 用网线与灰盒连接
- 在 PC 端
设置-以太网中设置 PC 端 IP- 编辑 ip 为“手动”
- 设置 ip 地址:
***.***.***.*** - 子网前缀长度:24
- 网关:
***.***.***.*** - cmd 内运行
ping $YOUR_IP$测试连接是否正常,正常的话会收到 4 个数据包
- 软件 nomachine 连接
- nomachine 8.2.3 下载
- PC 端连接上网线后,nomachine 会自动读取到从机,双击连接即可。
环境变量设置
- 加载 ROS 环境
source /opt/ros/noetic/setup.bash
source ~/catkin_ws0/devel/setup.bash # 本机中工作空间很乱,还未理清,经过测试后catkin_ws0是可以正常执行的工作空间
# 注意以上两条添加的先后顺序- 设置主机 ip,在
~/.bashrc最后写入(原本是为了主从机通信服务的,现在不需要,所以不需要加入从机的 ip)
export ROS_HOSTNAME=$YOUR_IP # 主机ip地址
export ROS_MASTER_URI=http://$YOUR_IP:11311 # 主机IP地址:11311端口号
export ROS_IP=$YOUR_IP # 主机IP地址- 调整工作空间包路径 已将
robot_serial功能包从dmuuv_src中移到src根目录文件夹下, 不知会不会有其他影响,但是现在只有这样才能正常跑
功能包结构
dmuuv_src功能包中存放有几个子包,分别是;
dmuuv_msgs: msg 类型定义imu570_tools: imu 通信robot_controller: 自定义控制器robot_msgs: msg 类型定义robot_serial: 与 stm32 通信usb_cam: 与相机通信
电机转动 PWM 控制测试
- stm32 通信连接的是
/dev/ttyUSB1接口,给全部权限,运行如下命令(每次开机重启权限会重置,务必检查权限是否添加到位,否则会使串口启动失败)
sudo chmod 777 /dev/ttyUSB1- 检查
robot_serial功能包launch文件夹下send_pwm.launch启动文件,检查其连接串口应为/dev/ttyUSB1 - 硬件连接:各个电机的水密缆与腔体上的水密件分别连接,其中最中间的水密件是连接前方照明灯的,可以先不用连接。确保连接紧密后继续操作步骤。
- 启动 ROS 节点,以下命令需要分别在三个终端内运行:
roscore
roslaunch robot_serial send_pwm.launch
# 新开一个终端
cd ~/catkin_ws0/src/dmuuv_src/robot_controller/scripts
python test_pwm_keyboard.py # 启动用键盘控制电机转动pwm的控制节点在第三个终端内便可以通过键盘控制各个电机的 pwm 值。
- 测试结果:
- 图 1: 通过 py 程序操控电机时,py 上的顺序编号和水密件的映射关系
- 图 2: 电机的硬件连接,电机编号和水密件的映射关系,电机编号见图 3
- 图 3: 电机的布局,其编号和图 2 的编号一致,布局视角为 ROV 正放时的俯视图
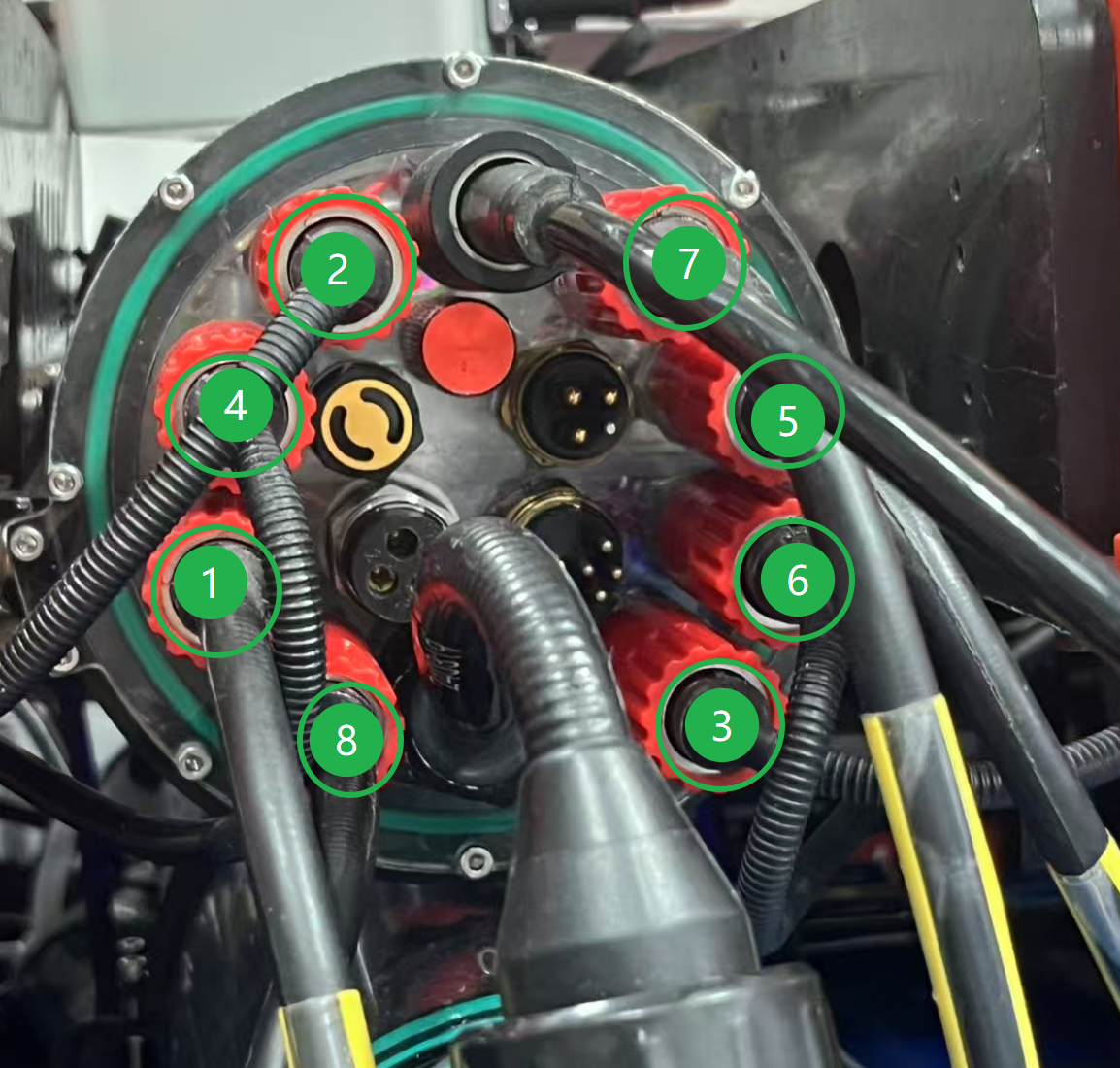
图1:通过py程序操控电机时,py上的顺序编号和水密件的映射关系 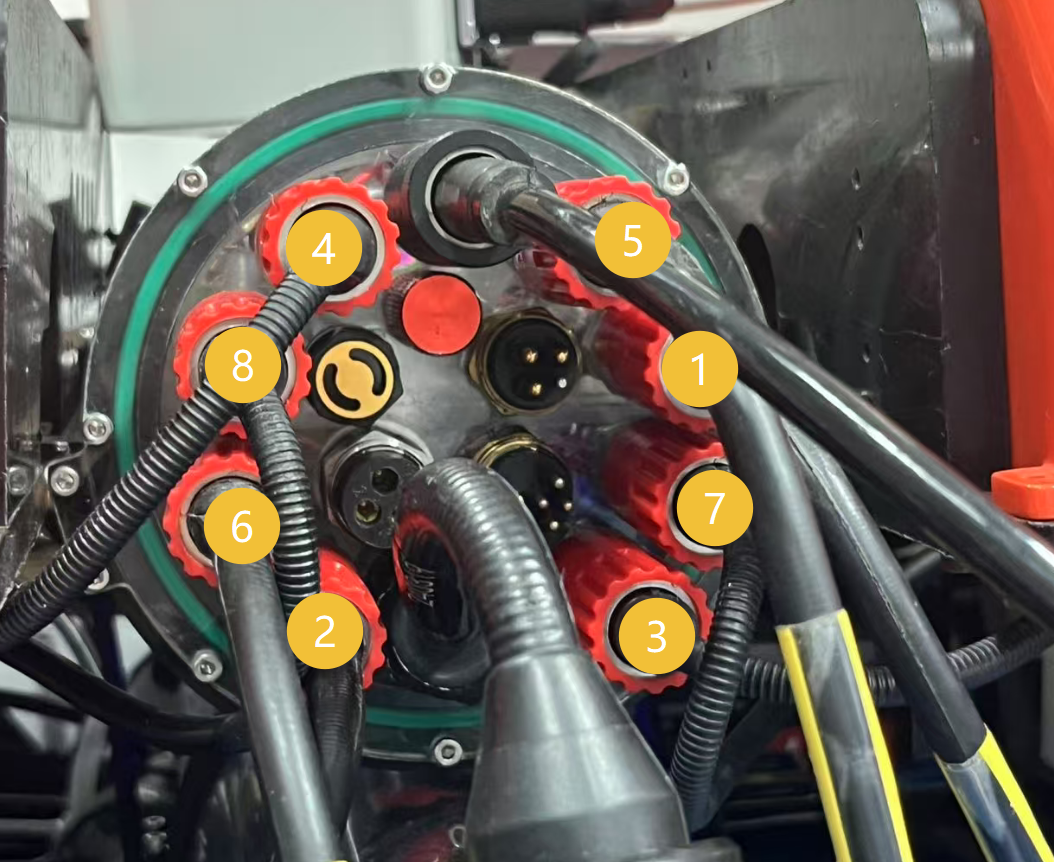
图2:电机的硬件连接,电机编号和水密件的映射关系,电机编号见右图 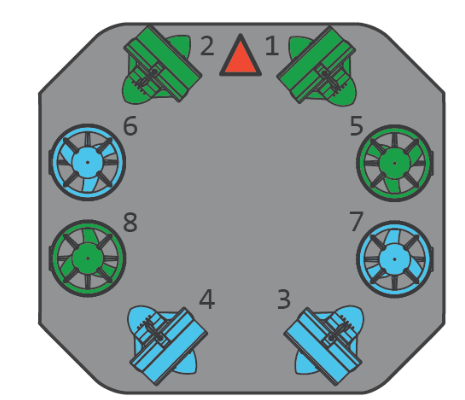
图3:电机的布局,其编号和左图的编号一致
bug
- python 程序编码错误,导致中文注释无法识别
在程序最开始加上#coding: utf-8指明编码模式
- python 解释器错误:因环境不对,导致各类包未找到,比如这次没有找到
yaml包
修改 shebang,将#!/usr/bin/env python修改为#!/usr/bin/env python3
UUV Simulator
UUV_Simulator 特性
Actuators 执行器
通过.xacro文件配置
xacro 一种 xml 语言,用于构建 urdf 包,这个 urdf 包主要是用来搭建一个机器人的,可以用于配置机器人的传感器、模型、环境等信息。官方文档
Thruster Unit 推进器单元
推进器单元包含转子的动力学和转换函数(转子角速度 - 输出推力大小之间的 conversion function)
dynamicconversion
<xacro:macro name="thruster_macro">用于定义推进器单元,主要包括:thruster link, joint, Gazebo plugin
<link name="${robot_namespace}/thruster_${thruster_id}"><inertial>-标签,用于描述推进器转子的惯性质量等参数<visual>-标签,不知道干啥使的(
<joint name="${robot_namespace}/thruster_${thruster_id}_joint><xacro:insert_block name="origin" /><parent link="${robot_namespace}/base_link" />-父标签,用于指定机器人机体<child link="${robot_namespace}/thruster_${thruster_id}" />-子标签,用于指定机器人推进器- joint 用处是把机器人机体和推进器连接在一起
<plugin name="${robot_namespace}_${thruster_id}_thruster_model"><linkName>-thruster link 名字<jointName>-jonit linke 名字<thrusterID>-推进器 ID(但是这个信息已经在 Linkname 里面包含了,为什么还要再写一遍)<gain>-获取输入命令信号<clampMax>-可被允许的输入信号最大值<clampMin>-可被允许的输入信号最小值<thrustMin><thrustMax>-可被允许的输出推力的最大最小值<thrust_efficiency>-推进器效率<dynamics>-动力学模型<conversion>-转换模型
xacro 的宏定义包含:
macro-定义新的宏name参数可以指定该宏的名字,在之后通过xacro:<name>来调用这个新定义的宏param参数可以指定该宏需要的输入参数,在之后调用时输入
insert_block-插入代码块property-定义属性box_inertial-定义盒状物体的惯性参数<origin>标签用于定义惯性参考系的位置和姿态,包含xyz和rpy参数
Fins Unit
包含:dynamic model and a lift and drag model
dynamic model转子动力学lift and drag model升降力模型
定义和 thruster 单元类似,把conversion模型换成liftdrag
Gazebo World 环境信息配置
通过.world文件配置
<physics>- 配置物理引擎<ode>-ode 微分方程求解器
<scene>场景信息:白云、雾气等<spherical_coordinates>-坐标系放置的经纬度<light>-光照信息<plugin name="underwater_current_plugin" filename="libuuv_underwater_current_ros_plugin.so">-水流插件,需要配置水流速度大小与速度方向<plugin name="sc_interface" filename="libuuv_sc_ros_interface_plugin.so"/>-水下场景插件,管理水下环境特性<gui>-定义启动时相机视角
场景类型:
AUV Underwater World-包含FinPlugin和FinROSPlugin插件,可以产生多个 AUVEmpty Underwater WorldOcean waves world
Path and trajectory generators 路径和轨迹生成器
基于路径点产生轨迹,把任意路径分成直线和曲线段,利用参数方程定义轨迹,然后再根据方程生成路径点数据
两个功能包存放于uuv_trajectory_control中,分别为uuv_waypoints和uuv_trajectory_generator
项目结构
通过 uuv_simulator 能够创建一个新的机器人,在 uuv 所提供的环境下仿真。
- 创建一个机器人
rosrun uuv_assistants create_new_robot_model --robot_name <ROBOT_NAME>这会创建一个名为<ROBOT_NAME>_description文件夹,该文件夹的结构为:
<ROBOT_NAME>_description
|-- launch
|-- upload.launch
|-- meshes
|-- README.md
|-- robots
|-- default.xacro
|-- urdf
|-- actuators.xacro
|-- base.xacro
|-- gazebo.xacro
|-- sensors.xacro
|-- snippets.xacro
`-- CMakeLists.txt
`-- package.xml该文件夹可以认为是 ROS 的一个 package
upload.launch: 是加载该机器人的 launch 文件meshes/: 该文件夹下放置有该机器人的 3D 模型文件,便于机器人的可视化呈现urdf/:该文件夹中包含有用来搭建一个机器人的,可以用于配置机器人的传感器、模型、环境等信息,用.xacro文件配置,采用xml文件配置,机器人的Actuators 执行器就是用这个文件夹来定义的。robot/:该文件夹中用.xacro配置一个机器人的基本信息,但是通过调用urdf/的包,把推进器、传感器等信息连接起来。
添加自定义 launch 文件
- 在某个指定功能包的
launch文件夹内添加.launch文件 - 在该功能包的
scripts文件夹内添加.py脚本文件 - 运行命令:
sudo chmod +x /path_to_python_file为该 python 脚本文件添加权限
动力学相关
TAM 矩阵
roslaunch <ROBOT_NAME>_control start_thruster_manager.launch reset_tam:=true通过以上命令可以启动thruster_manager,可以通过设置reset_tam:=false来生成 tam 矩阵。
- tam 矩阵的用法:
tam 矩阵为6x6矩阵,各行各列意义如下:
- 行代表 6 个控制需求
- 前 3 行:X、Y、Z 方向的力
- 后 3 行:绕 X、Y、Z 轴的力矩(Roll、Pitch、Yaw)
- 列:代表 6 个推进器的贡献
- 列 1-4:水平推进器(前左、前右、后左、后右)
- 列 5-6:垂直推进器(左、右)
使用方式:[推进器力] = TAM^(-1) * [期望控制力]
Bluerov2 tam 矩阵如下:
tam:
- [0.7071067811847433, 0.7071067811847433, -0.7071067811919605, -0.7071067811919605, 0.0, 0.0]
- [0.7071067811883519, -0.7071067811883519, 0.7071067811811348, -0.7071067811811348, 0.0, 0.0]
- [0.0, 0.0, 0.0, 0.0, 1.0000000000000002, 1.0000000000000002]
- [0.051265241636155506, -0.05126524163615552, 0.05126524163563227, -0.05126524163563227, -0.11050000000000001, 0.11050000000000003]
- [-0.05126524163589389, -0.051265241635893896, 0.05126524163641713, 0.05126524163641713, -0.002499999999974481, -0.002499999999974481]
- [0.16652364696949604, -0.16652364696949604, -0.17500892834341342, 0.17500892834341342, 0.0, 0.0]动力学公式
用 Fossen 的书是最权威的,为了方便查找,我把 Fossen 书中对应的页码索引列在此处
- 叉乘算子定义:P20
- 附加质量 + 质量矩阵:P182
- 阻尼矩阵:P182
- 科里奥利力矩阵:刚体质量科里奥利力矩阵 P56,附加质量科里奥利力矩阵:P120
- 静态水动力恢复力计算:P60,下面这是当重心和浮心重合时的情况
- 动力学模型:P110
话题用法记录
/bluerov2/pose_gt:存有当前 UUV 所处位置坐标和在全局坐标系下的 UUV 当前速度/bluerov2/thrusters/{i}/thrust:各推进器的转速,可以通过监控该话题,获得推进器转速曲线