stm32
stm32
名词解释
| 英文缩写 | 全拼 | 含义 |
|---|---|---|
| AHB | Advanced High-performance Bus | 高级高性能总线 |
| APB | Advanced Peripheral Bus | 高级外设总线 |
| RTC | Real-Time Clock | 实时时钟 |
| RCC | Reset and Clock Control | 复位和时钟控制 |
| AFIO | Alternate function io | 复用功能重映射/中断引脚选择 |
| OC | Output Compare | 输出比较 |
| IC | Input Capture | 输入捕获 |
| CC | Capture/Compare | 捕获/比较 |
提示
要关注一下单片机的内部结构图,尤其关注总线和外设的挂载方式,比如 stm32,所有的 GPIO 口都是挂载在 APB2 总线上的,调用的时候就要注意用 APB2 总线。
库函数的模板函数
stm32 的库函数内各种外设的函数基本上都是有迹可循的,常见的有如下几种:
xxxx_InitTypeDef用于外设初始化的结构体类型名xxxx_Init()对某个外设初始化,常常以对应结构体作为参数。xxxx_DeInit()去初始化,恢复默认配置xxxx_StructInit()对结构体变量赋默认值xxxx_ITConfig()使能外设的中断输出xxxx_GetFlagStatus()读取状态寄存器内状态标志位的值xxxx_ClearFlag()清空状态标志位xxxx_GetITFlag()获取中断标志位xxxx_ClearITPendingBit()清除中断标志位最后四个函数的本质是操作状态寄存器,每个外设的状态寄存器里会有对应的状态标志位,比如说串口的状态标志位表示是否收到信息,
xxxx_GetFlagStatus()和xxxx_ClearFlag()就是对这个标志位操作;最后两个处理的是和中断有关的标志位。
GPIO
模式:开漏输出、推挽输出、模拟输入、上下拉/浮空输入等
上下拉/浮空输入都是数字信号的输入模式,区别在于当引脚悬空时,上拉输入模式下内部连接上拉电阻,默认为高电平;下拉模式下内部连接下拉电阻,默认为低电平;浮空输入下,引脚悬空时电平高低无法确定
配置方法:
- 使能时钟
RCC_APB1.2PeriphClockCmd() - 配置结构体,stm32 中采用
GPIO_InitTypeDef结构体类型,一般要定义该结构体下的GPIO_Mode,GPIO_Pin,GPIO_Speed这三个参数。Pin 口如果有多个,用|连接,比如:GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1 | GPIO_Pin_2 - 初始化:
GPIO_Init(GPIOx, &GPIO_InitStructure) - 指定对应操作
引脚重映射
- 开启 AFIO 时钟
GPIO_PinRemapConfig()配置引脚重映射- 查数据手册,查看重映射方式,确认
GPIO_PinRemapConfig()函数的参数;注意有时要解除调试端口(JTRST/JTAG/SWD)的复用,但是解除调试端口后,就无法通过 TLink 烧录程序,只能用串口烧录,得注意。
中断
- 中断 :在主程序运行过程中,出现了特定的中断出触发条件(中断源),使得 CPU 暂停当前正在运行的程序,转而去处理中断程序,处理完成后又返回原来被暂停的位置继续运行。
- 中断优先级:当有多个中断源同时申请中断时,CPU 会根据中断源的轻重缓急进行裁决,优先响应紧急中断源
- stm32 中利用 NVIC(嵌套中断向量控制器)管理中断,每个中断通道拥有 16 个可编程的优先等级,可对优先级进行分组,进一步设置抢占优先级(Pre-Emption Priority)和响应优先级(Subpriority)
抢占优先级高的可以中断嵌套,响应优先级高的可以优先排队,两者均相同的按中断号排队。NVIC 对中断优先级进行了分组,以此区分抢占优先级和响应优先级。
中断源(包括EXTI,TIM,ADC,USART) -> NVIC -> CPU,实际运行工作中,会有很多的外设产生中断请求,这时候需要由 NVIC 通过中断优先级裁决哪一个中断优先处理,然后把这个中断再发送给 CPU 做对应处理。
- NVIC 配置
NVIC_PriorityGroupConfig()该函数配置中断优先级分组NVIC_InitTypeDef设置结构体配置 NVIC 相关参数NVIC_IRQChannel配置 NVIC 通道NVIC_IRQChannelCmd通道使能NVIC_IRQChannelPreemptionPriority抢占优先级NVIC_IRQChannelSubPriority响应优先级
NVIC_Init()初始化,传入结构体的地址
EXTI(External Interrupt) 外部中断
- 监测指定 GPIO 电平信号,当 GPIO 产生电平变化时,EXTI 向 NVIC 发送中断申请,经过 NVIC 裁决后中断 CPU 主程序,使 CPU 开始响应 EXIT 对应的中断程序。
- 支持所有的 GPIO 口,但是相同的 Pin 不能同时触发中断;
- 通道数:16 个
GPIO_Pin, 外加 PVD 输出、RTC 闹钟、USB 唤醒、以太网唤醒 - 响应方式:中断响应/事件响应
- 触发方式:上下边沿触发/双边沿触发/软件触发
EXTI 中断结构:
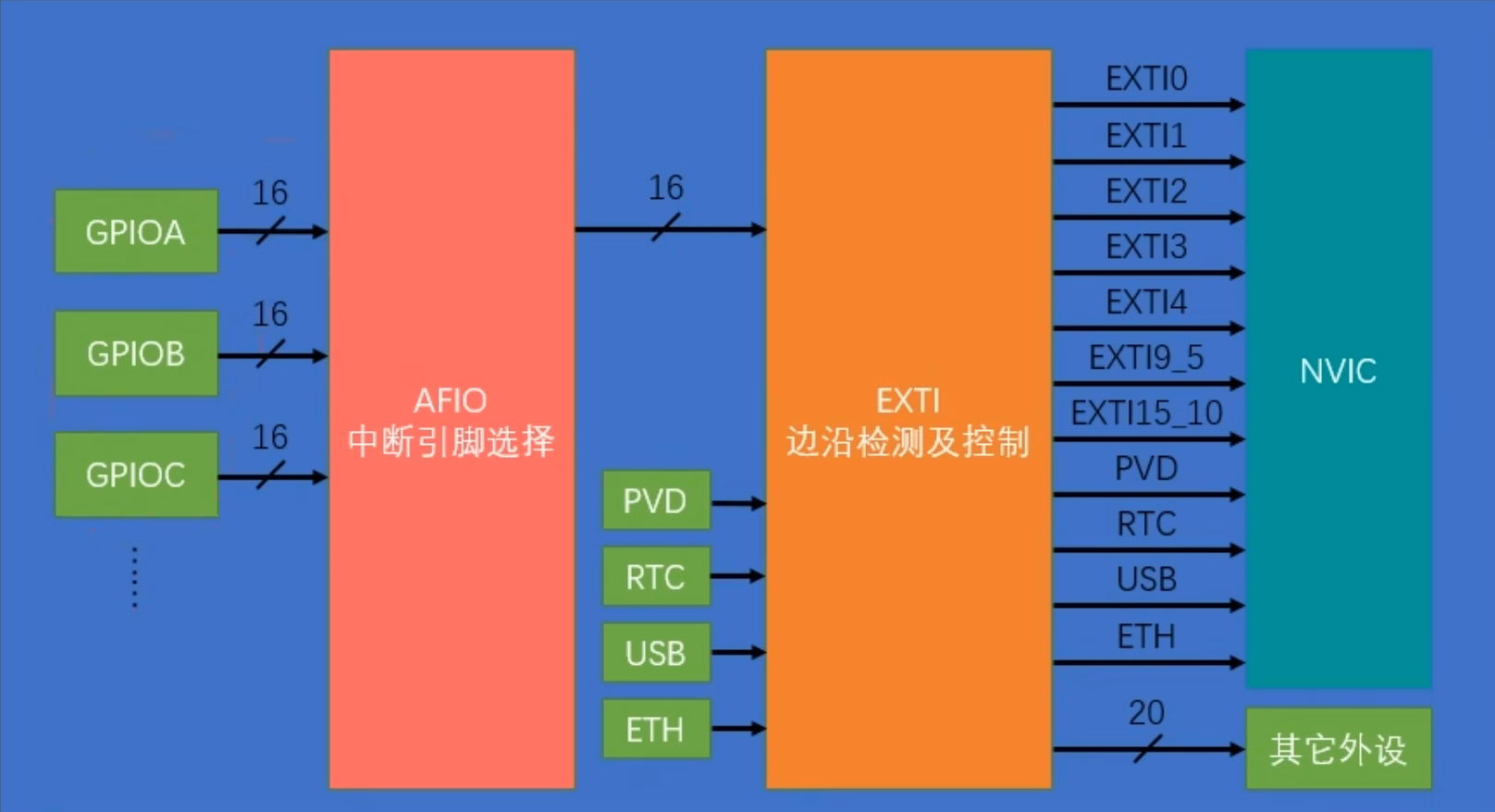
其中,AFIO 用于选择 GPIO 引脚,比如 A0,B0,C0,D0,经过 AFIO 选择后,只有一个能接到 EXTI 的通道 0 上。
旋转编码器、光敏传感器这种产生连续信号波且转瞬即逝波形的外设,建议用外部中断处理,而按键触发,考虑采用 GPIO 输入读取,因为这样能比较好地处理按键抖动和松手检测的问题。
配置方法
- 打开对应外设时钟,包括:GPIO,AFIO,注意 EXTI,NVIC 的时钟不用单独开启,保持默认打开
- 配置 GPIO,AFIO
AFIO 没有专门的库函数,包含在 GPIO 的库函数里了,其中
GPIO_PinRemapConfig()用于引脚的重映射;GPIO_EXTILineConfig()用于 EXTI 的通道选择,具体参数见库函数说明。 - 配置 EXTI 的响应通道和响应方式,包括:
EXTI_Line,EXTI_LineCmd,EXTI_Mode,EXTI_Trigger - 配置 NVIC,包括配置优先级分组 (一般选用 2 分组) 和初始化 NVIC
- 写中断函数,中断函数的名字需要参考启动文件中的
startup_stm32f10x_md.s,参考其中断向量表中以EXTI开头的函数名,注意中断函数是无参无返回值的。- 判断中断标志位,在中断函数里使用
EXTI_GetITStatus()函数最重要的一步,不同的中断标志位应该采取不同的操作,所以要先 if 判断标志位,再写需要的操作
- 写中断时需要的操作
- 清除中断标志位
别漏了
- 判断中断标志位,在中断函数里使用
TIM 定时器中断
定时器可以对输入的时钟进行计数,并在计数值达到设定值时触发中断。内容极多。
主要功能包括:
定时器类型
| 定时器类型 | 功能 |
|---|---|
| 高级定时器 | 拥有通用定时器的全部功能,并且额外具有重复计数器,死区生成,互补输出,刹车输入等针对无刷电机设计的功能 |
| 通用定时器 | 拥有基本定时器的全部功能,并额外具有内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等功能 |
| 基本定时器 | 拥有定时中断、主模式触发 DAC 功能,时钟源只能选择内部时钟,其他两种类型可以选择外部时钟 |
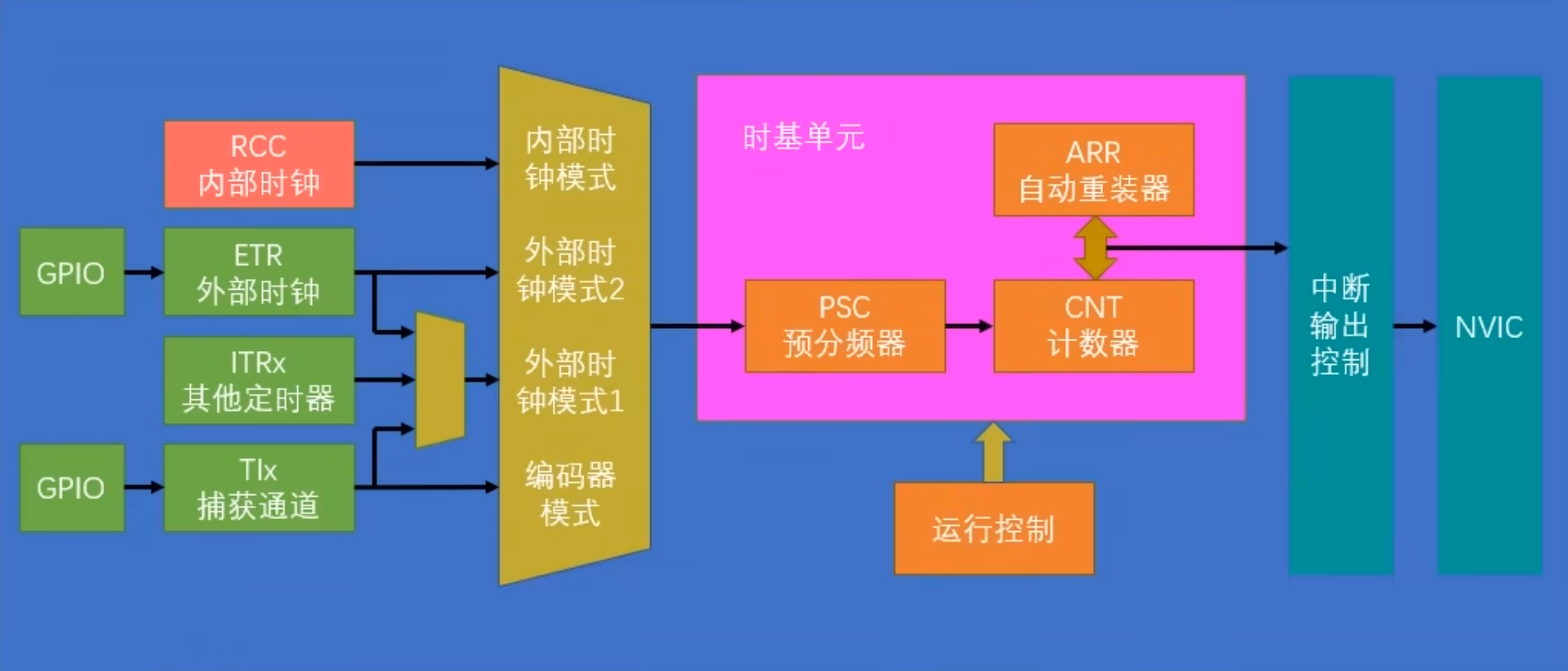
TIM 中断结构
基本定时器结构
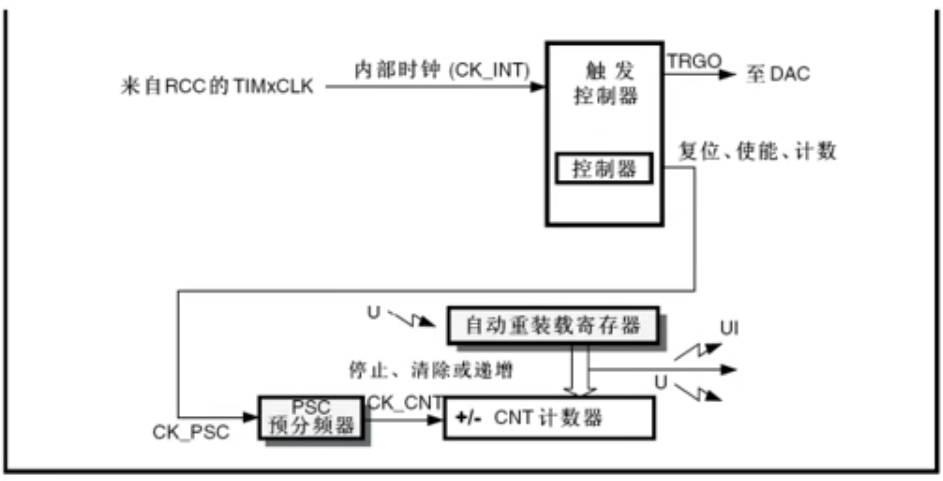
CK_PSC预分频器的输入时钟,选内部时钟一般是 72MHzCNT_EN计数器使能,高电平计数器正常运行CK_CNT计数器时钟
时序图细节解析
定时时间的计算如下,后面是解释说明。`
当预分频器的参数从 0 变到 1 时,计数器的时序图
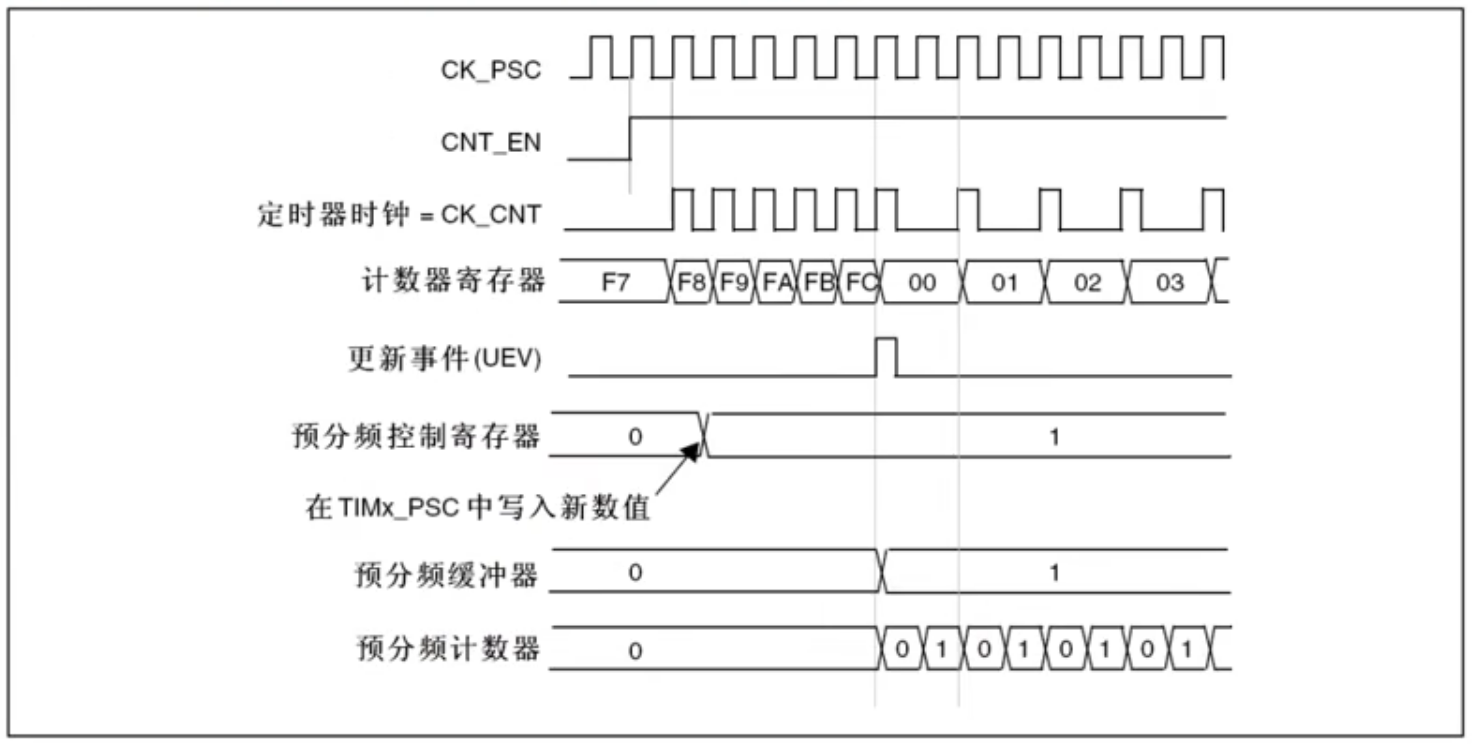
PSC分频系数计数器寄存器计数用,下图中寄存器跟随时钟上升沿递增计数更新事件在 FC 之后达到 ARR 重装值,下一个时钟来临时计数器清 0,更新事件产生脉冲预分频控制寄存器为预分频寄存器提供了一种缓冲机制,在任意时刻,程序将预分频系数从 0 改成 1,此时并不会马上对预分频系数进行更改,而是先更改影子寄存器(或者叫缓冲寄存器),等待这个循环周期结束之后(即:计数器达到 ARR 自动重装值后),才会将预分频系数正式改为 1,防止了一些不必要的麻烦。- 计数器寄存器的计数频率,是靠另一个计数器实现的,这个计数器是图中最下方的预分频计数器,当预分频系数为 0 时,不动;当预分频计数器为 1 时,0,1,0,1 交替计数,计数到 1 时向计数器寄存器发送递增信号,计数器寄存器递增+1。
内部时钟分频因子为 2 时,计数器的时序图
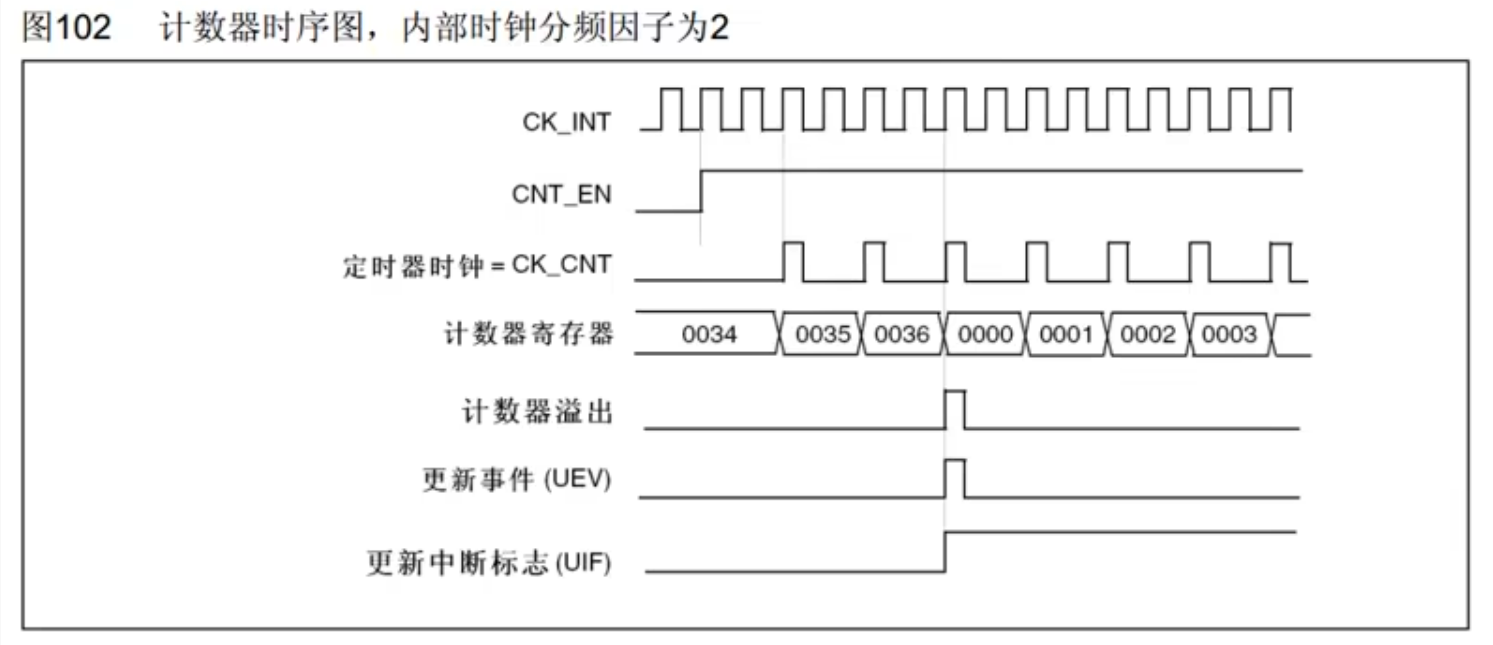
CK_INT内部时钟 72MHzCNT_EN时钟使能,高电平启动CK_CNT计数器时钟- 等计数器寄存器递增到 ARR 重装值时,计数器溢出,更新事件产生一个脉冲信号,更新中断标志位置 1,让中断控制器去 NVIC 申请中断。所以我们要的定时,就是计数器溢出的两个脉冲之间的距离,把这个频率称为
CK_CNT_OV。所以在设置定时的时候,我们主要要算的就是这个CK_CNT_OV,就是要根据内部时钟频率,计算出PSC和ARR的具体取值。
这样,这个定时时间的计算就是:
定时中断
- 使能 RCC 时钟
- 选择时钟源为内部时钟模式
void TIM_InternalClockConfig();配置内部时钟void TIM_ITRxExternalClockConfig();配置其他定时器的外部时钟模式 1void TIM_TIxExternalClockConfig();选择捕获通道的外部时钟模式 1void TIM_ETRClockMode1Config();选择 ETR 外部时钟模式 1void TIM_ETRClockMode2Config();选择 ETR 外部时钟模式 2void TIM_ETRConfig();单独配置 ETR 引脚的极性、滤波器等
- 时基单元初始化
TIM_TimeBaseInit():预分频器,计数器,自动重装器,用结构体TIM_TimeBaseInitTypeDef配置- 这个结构体里面有一个
TIM_RepetitionCounter这个值,是高级计数器才有的,其他计数器不用,直接赋值给 0 就行 TIM_Period指的是 ARR 自动重装器的值,数字格式为int,取值范围在 0~65535,定义的时候需要-1TIM_Prescaler指的是 PSC 预分频器的值,数字格式为int,取值范围在 0~65535,定义的时候需要-1
- 这个结构体里面有一个
- 配置输出中断控制
TIM_ITConfig() - 配置 NVIC ,打开定时器中断通道
- 定时器启动
TIM_Cmd(),写定时器中断函数
其他函数:
TIM_PrescalerConfig()单独修改 PSC 预分频值TIM_CounterModeConfig()单独修改计数器计数模式TIM_ARRPreloadConfig()单独修改自动重装器预装功能TIM_SetCounter()给计数器写入一个值TIM_SetAutoreload()给自动重装器写入一个值TIM_GetCounter()获取当前计数器的值TIM_GetPrescaler()获取当前预分频器的值
输出比较 OC(Output Compare)
用于输出 PWM 波形,控制电机。
输出比较通过比较 CNT 计数器和 CCR 寄存器值的关系,对输出电平进行置 1、置 0 或翻转的操作,用于输出一定频率和占空比的 PWM 波形。(CNT 就是前面说的定时跳变的计数器,CCR 是有一个预设的值,CNT 计数达到 CCR 了之后,就会让输出依次置 1,置 0)

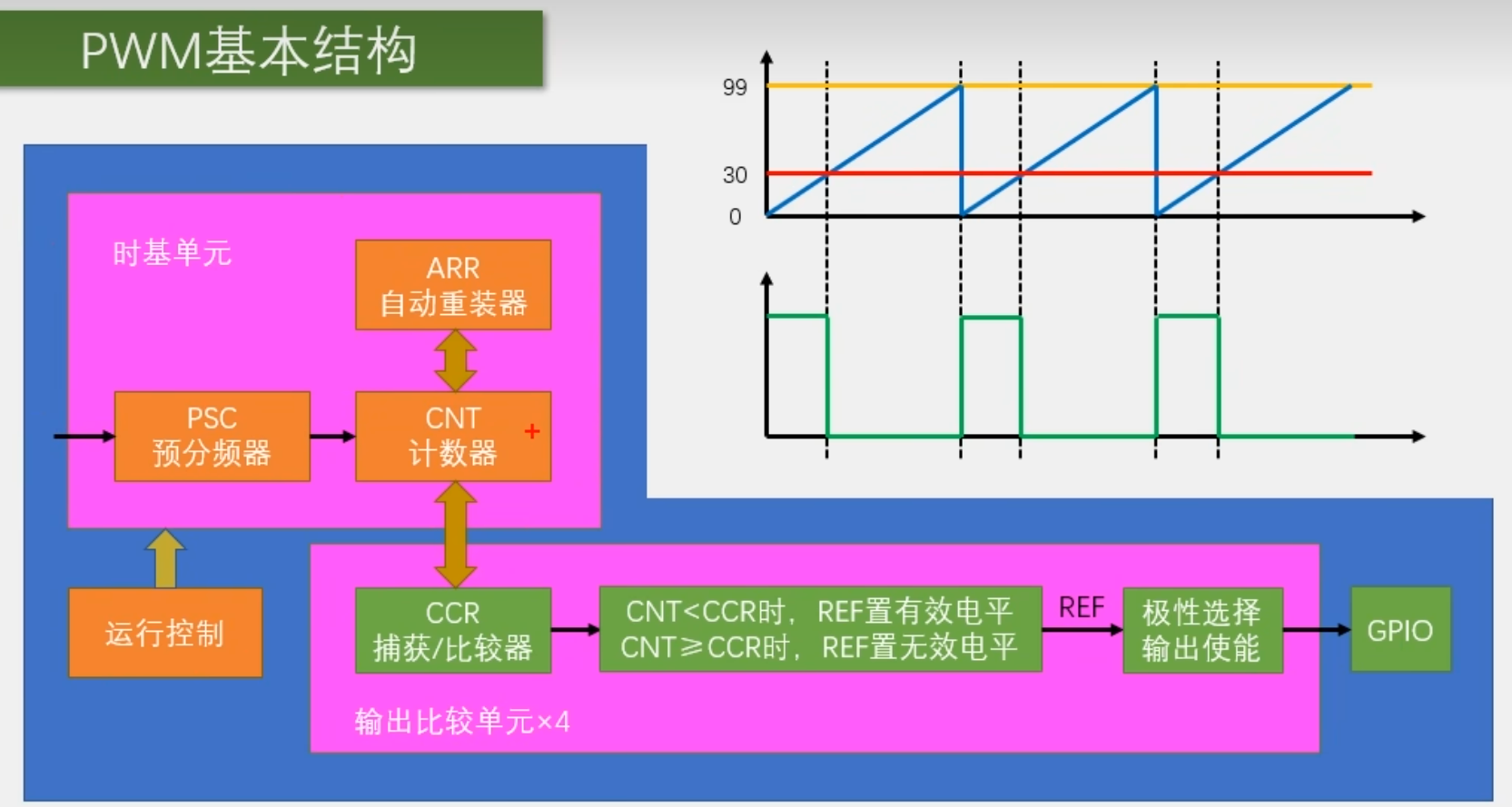
时基单元之前的时钟选择,和定时中断的配置一致,与之区别是最后不需要配置中断,而是配置输出比较单元和 IO 口。
PWM 相关参数:
| 物理量 | 表达式 | 计算方法 |
|---|---|---|
| 频率 | ||
| 占空比 | ||
| 分辨率 | 占空比变化步距 |
PWM 波形频率与占空比的调整
- 通过调整 PSC 以调整 PWM 的频率,利用
TIM_PrescalerConfig()函数 - 通过调整 CCR 以调整 PWM 的占空比,利用
TIM_SetComparex()函数 - 而 ARR 是确定分辨率,如果分辨率取 1%,则直接定 ARR 为
100-1
配置方法
- 打开时钟
- 配置输出比较单元
TIM_OCxInit()输出比较单元初始化,利用TIM_OCInitTypeDef结构体初始化TIM_OCMode设置输出比较的模式TIM_OCPolarity设置输出比较的极性TIM_OutputState设置输出使能TIM_Pulse设置 CCR,决定了占空比
TIM_SelectOCxM()选择输出比较模式TIM_SetComparex()更改 CCR 的值进而占空比,可以由此实现 PWM 占空比的连续变化
- 查引脚定义表定义 GPIO 口,定时器控制引脚需要使用复用开漏/推挽输出模式。
输入捕获 IC (Input Capture)
输入捕获模式下,当通道输入引脚出现指定电平跳变时,当前 CNT 的值将被锁存到 CCR 中,可用于测量 PWM 波形的频率、占空比、脉冲间隔、电平持续时间等参数。可配置为 PWMI 模式,同时测量频率和占空比;可配合主从触发模式,实现硬件全自动测量
输入捕获测量频率采用测周法,即:测量两个上升沿到达之间的间隔时间。
PWMI 模式
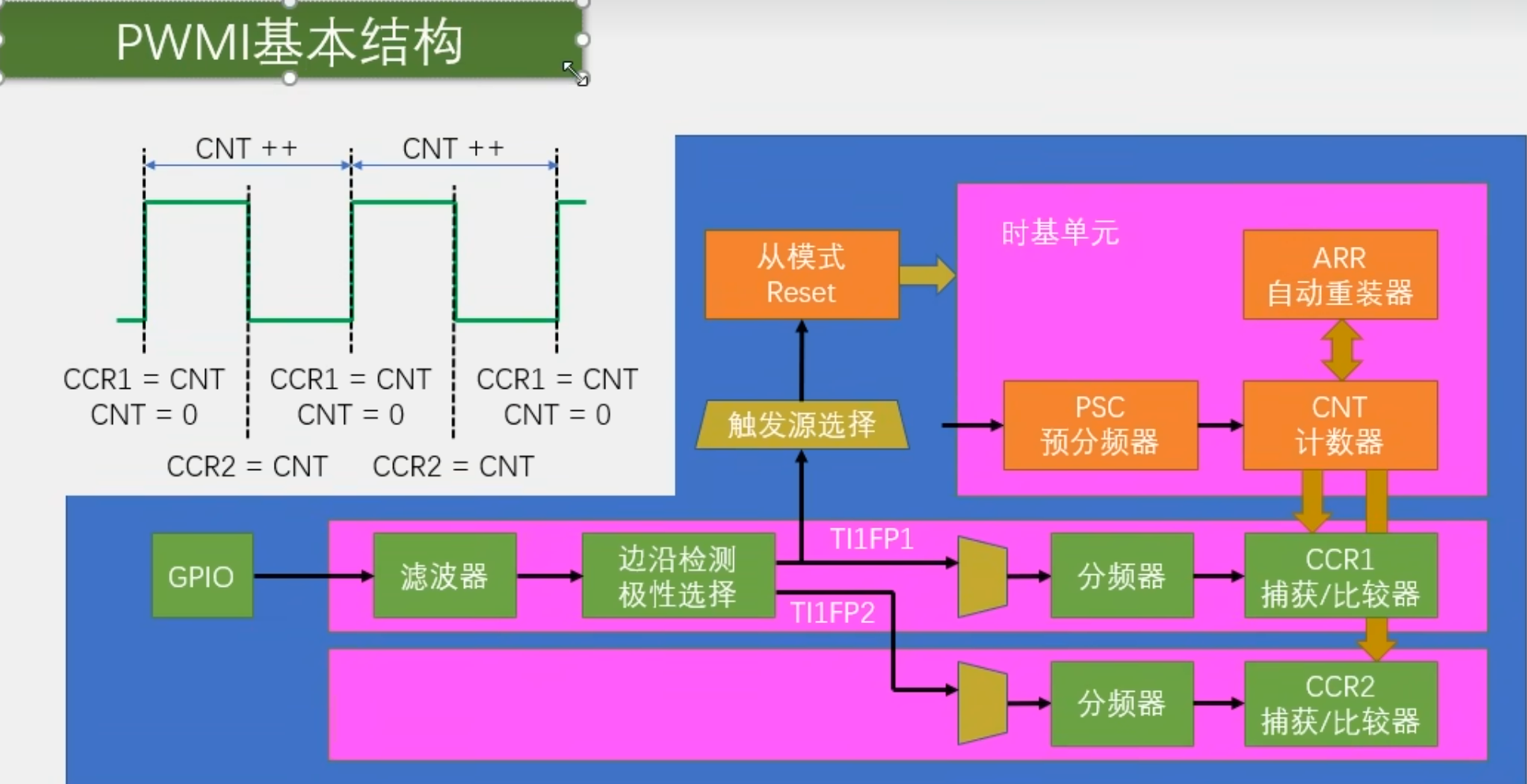
一个信号通给两个数据选择器,使得两个通道同时测量占空比和频率成为了可能。
配置方法
- RCC 开启 GPIO 和 TIM 的时钟
- GPIO 初始化为输入模式
- 配置时基单元
- 配置输入捕获单元,可用结构体
TIM_ICInitTypeDef进行配置TIM_ICInit()配置单通道TIM_PWMIInit()配置交叉的双通道
- 选择从模式的触发源
TIM_SelectInputTrigger(),触发源为 TI1FP1 - 选择触发之后选择的操作
TIM_SelectSlaveMode() - 定时器使能
TIM_Cmd()
主从触发模式
- 主模式是将定时器的内部信号,映射到 TRGO 引脚,进而驱动其他外设
- 从模式是接收其他外设或者自身外设的一些信号,映射到 TRGI 引脚,用于控制自身定时器的运行(如复位、关闭等)
- 具体可以用于哪些信号和哪些外设,查手册吧
- 主从模式的操作由硬件自动化进行,软件上只需要一行代码解决。
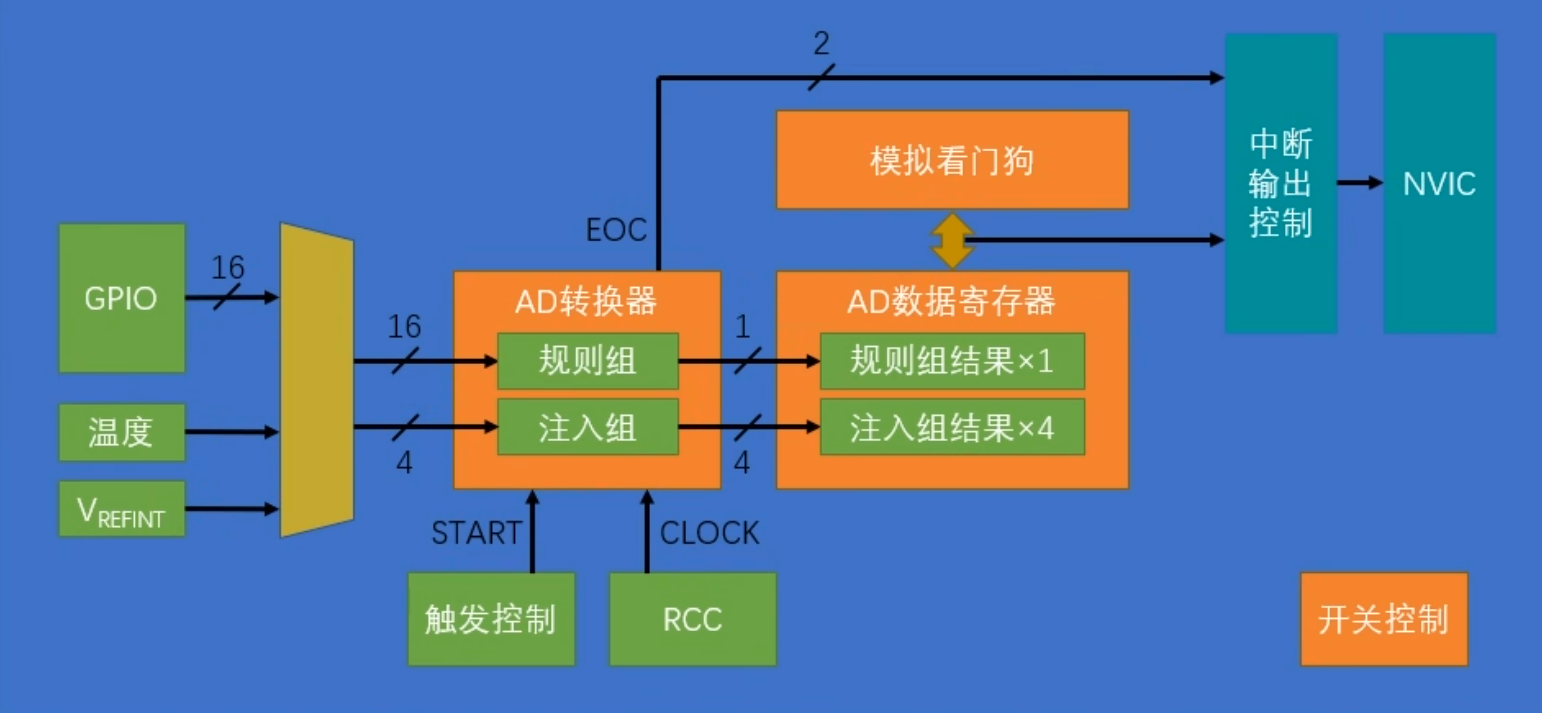
ADC 模数转换器
ADC 可以将引脚上连续变化的模拟电压转换为内存中存储的数字变量,建立模拟电路到数字电路的桥梁。
- stm32 提供 12 位逐次逼近型 ADC
- 1us 转换时间
- 输入电压范围:0-3.3V
- 转换结果范围:0-4095
- 规则组和注入组两个转换单元
- 模拟看门狗自动监测输入电压范围
注入组和规则组是 stm32 提供的两种转换方式,目前还没学习其区别。但是,注入组有 4 个数据寄存器,规则组只有 1 个,所以需要配合 DMA 及时地转运数据,防止数据被覆盖。
| 转换方式 | 备注 |
|---|---|
| ADC | 模拟数字转换器 |
| DAC | 数字模拟转换器 |
| PWM | 调制波信号生成,也可以实现数字转模拟,比 DAC 常用 |
转换模式
- 单次转换 or 连续转换
- 单次转换:转换结束后会停下,不会继续转换,下次转化需要手动开启
- 连续转换:转换结束后不停下,继续转换,可以随时在寄存器读取 ADC 的值
- 扫描模式 or 非扫描模式
- 扫描模式:多个通道一起转换
- 非扫描模式:单个通道独立转换
配置方法
- 打开 GPIO,ADC 和 RCC ADC 分频器的时钟
RCC_ADCCLKConfig() - 配置 GPIO,设置为模拟输入模式
- 配置多路开关
- 配置 ADC 转换器,用结构体配置,参数很多
- 配置 ADC 校准
- 开关控制
ADC_Cmd()供电使能
通信
CAN 通信
CAN 通信的原理和细节,放在博客的另一个页面中,点此跳转
stm32 的 CAN 通信具体实现细节,见此视频
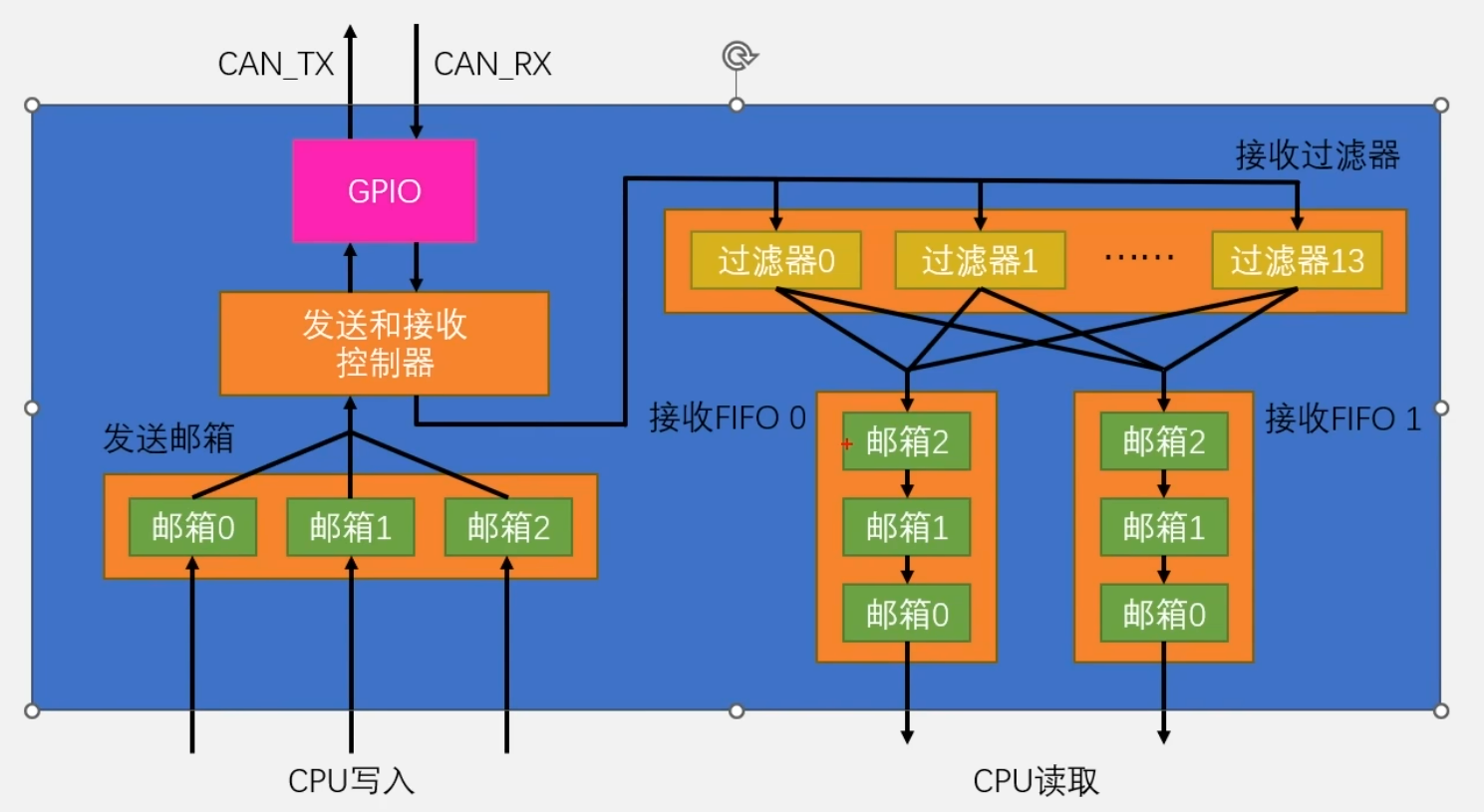
FIFO 是先进先出寄存器,相当于一个 Queue 数据结构
过滤器配置
每个过滤器由两个 32 位寄存器组成:R1[31:0],R2[31:0]
| 标志位 | 设置作用 | 置 0 | 置 1 |
|---|---|---|---|
| FSCx | 位宽设置 | 16 位 | 32 位 |
| FBMx | 模式设置 | 屏蔽模式 | 列表模式 |
| FFAx | 关联设置 | FIFO 0 | FIFO 1 |
| FACTx | 激活设置 | 禁用 | 启用 |
配置方法
- 自发自收模式配置
- 打开 RCC 时钟,包括 GPIO,CAN1
- GPIO 初始化,CAN_TX 引脚初始化为复用推挽输出模式,CAN_RX 为上拉输入模式
- CAN 外设初始化,采用结构体配置
- 过滤器初始化,采用结构体配置
- 报文数据写入发送结构体,调用发送函数
- 调用检查 FIFO 状态函数,报文数据存入到接收的结构体中,读取结构体即可。
程序实现
CAN 通信发送函数
用结构体定义发送相关参数(标准帧/扩展帧,数据帧长度等),用 HAL 库函数发送数据。
- 输入参数:报文 ID,数据帧(以数组形式存储)指针,数据帧长度
- 输出参数:无
/*发送数据函数*/
CAN_TxHeaderTypeDef TxMessage;
CAN_HandleTypeDef hcan;
void CAN_Send_Test(uint32_t ID, uint8_t txdata[],uint16_t len)
{
uint32_t pTxMailbox = 0;
TxMessage.IDE = CAN_ID_EXT; //设置ID类型
// TxMessage.StdId = ID;
TxMessage.ExtId = ID; //设置ID号
TxMessage.RTR = CAN_RTR_DATA; //设置传送数据帧
TxMessage.DLC = len; //设置数据长度
HAL_CAN_AddTxMessage(&hcan, &TxMessage,txdata, &pTxMailbox);
}CAN_TxHeaderTypeDef结构体定义(每块开发板不一样,需要去驱动程序里找)
// CAN_TxHeaderTypeDef 结构体定义
/**
* @brief CAN Tx message header structure definition
*/
typedef struct
{
uint32_t StdId; /*!< Specifies the standard identifier.
This parameter must be a number between Min_Data = 0 and Max_Data = 0x7FF. */
uint32_t ExtId; /*!< Specifies the extended identifier.
This parameter must be a number between Min_Data = 0 and Max_Data = 0x1FFFFFFF. */
uint32_t IDE; /*!< Specifies the type of identifier for the message that will be transmitted.
This parameter can be a value of @ref CAN_identifier_type */
uint32_t RTR; /*!< Specifies the type of frame for the message that will be transmitted.
This parameter can be a value of @ref CAN_remote_transmission_request */
uint32_t DLC; /*!< Specifies the length of the frame that will be transmitted.
This parameter must be a number between Min_Data = 0 and Max_Data = 8. */
FunctionalState TransmitGlobalTime; /*!< Specifies whether the timestamp counter value captured on start
of frame transmission, is sent in DATA6 and DATA7 replacing pData[6] and pData[7].
@note: Time Triggered Communication Mode must be enabled.
@note: DLC must be programmed as 8 bytes, in order these 2 bytes are sent.
This parameter can be set to ENABLE or DISABLE. */
} CAN_TxHeaderTypeDef;CAN_HandleTypeDef结构体定义(直接看初始化函数方便点)
CAN_HandleTypeDef hcan;
/* CAN init function */
void MX_CAN_Init(void)
{
hcan.Instance = CAN1;
hcan.Init.Prescaler = 16;
hcan.Init.Mode = CAN_MODE_NORMAL;
hcan.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan.Init.TimeSeg1 = CAN_BS1_3TQ;
hcan.Init.TimeSeg2 = CAN_BS2_4TQ;
hcan.Init.TimeTriggeredMode = DISABLE;
hcan.Init.AutoBusOff = DISABLE;
hcan.Init.AutoWakeUp = DISABLE;
hcan.Init.AutoRetransmission = DISABLE;
hcan.Init.ReceiveFifoLocked = DISABLE;
hcan.Init.TransmitFifoPriority = ENABLE;
if (HAL_CAN_Init(&hcan) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN_Init 2 */
/* USER CODE END CAN_Init 2 */
}CAN 通信接收函数
这里给的只是标准帧接收数据,扩展帧改改就行。需要先在调用前定义好接收缓冲区,把这个缓冲区指针作为输入参数传入,该函数就会把接收到的内容写进这个缓冲区数组中。返回值是接收是否成功的标志位。
- 输入参数:接收 ID(标准帧),数据接收缓冲区数组指针
- 输出参数:接收是否成功,1 为成功(其实一般写 0 为成功更多……因为不同的非零数可以排查错误)
/**
* @brief CAN 接收数据查询
* @note 接收数据格式固定为: 标准ID, 数据帧
* @param id : 要查询的 标准ID(11位)
* @param buf : 数据缓存区
* @retval 接收结果
* @arg 0 , 无数据被接收到;
* @arg 其他, 接收的数据长度
*/
uint8_t can_receive_msg(uint32_t id, uint8_t *buf)
{
if (HAL_CAN_GetRxFifoFillLevel(&hcan, CAN_RX_FIFO0) == 0) /* 没有接收到数据 */
{
return 0;
}
if (HAL_CAN_GetRxMessage(&hcan, CAN_RX_FIFO0, &RxHeader, buf) != HAL_OK) /* 读取数据 */
{
return 0;
}
if (RxHeader.ExtId!= id || RxHeader.IDE != CAN_ID_EXT || RxHeader.RTR != CAN_RTR_DATA) /* 接收到的ID不对 / 不是拓展帧 / 不是数据帧 */
{
return 0;
}
return 1;
}调用方法:
uint8_t canbuf[8];
flag = can_receive_msg(0x012356F1, canbuf); // 0x012356F1为标准报文ID阻塞式 CAN 对话通信
阻塞式对话指一直广播消息,直到接收到反馈为止。可以加入超时报警,用 do while 循环实现。按照下面的程序,就能实现向某单位发送报文,并且在canbuf变量中拿到对面单位回复过来的报文内容。
uint8_t canbuf[8];
uint8_t txdata[8] = {0X00,0X01,0X02,0X03,0X04,0X05,0X06,0X07};//待机控制器指令
uint8_t sum = 0;
uint8_t flag = 1;
do
{
CAN_Send_Test(0x0123F156,txdata,8);//发送控制器交互报文
HAL_Delay(2000);
sum++;
flag = can_receive_msg(0x012356F1, canbuf);
if(sum > 20)
{
printf("超时错误告警!\r\n");
Error_Warn(); // 持续发送报警报文并跳出循环
}
}
while( flag == 0);//收到待机控制器反馈信息,如果没收到flag变量值会一直是0
sum = 0; // 清零标志位
printf("待机控制器收到充电指令!\r\n");
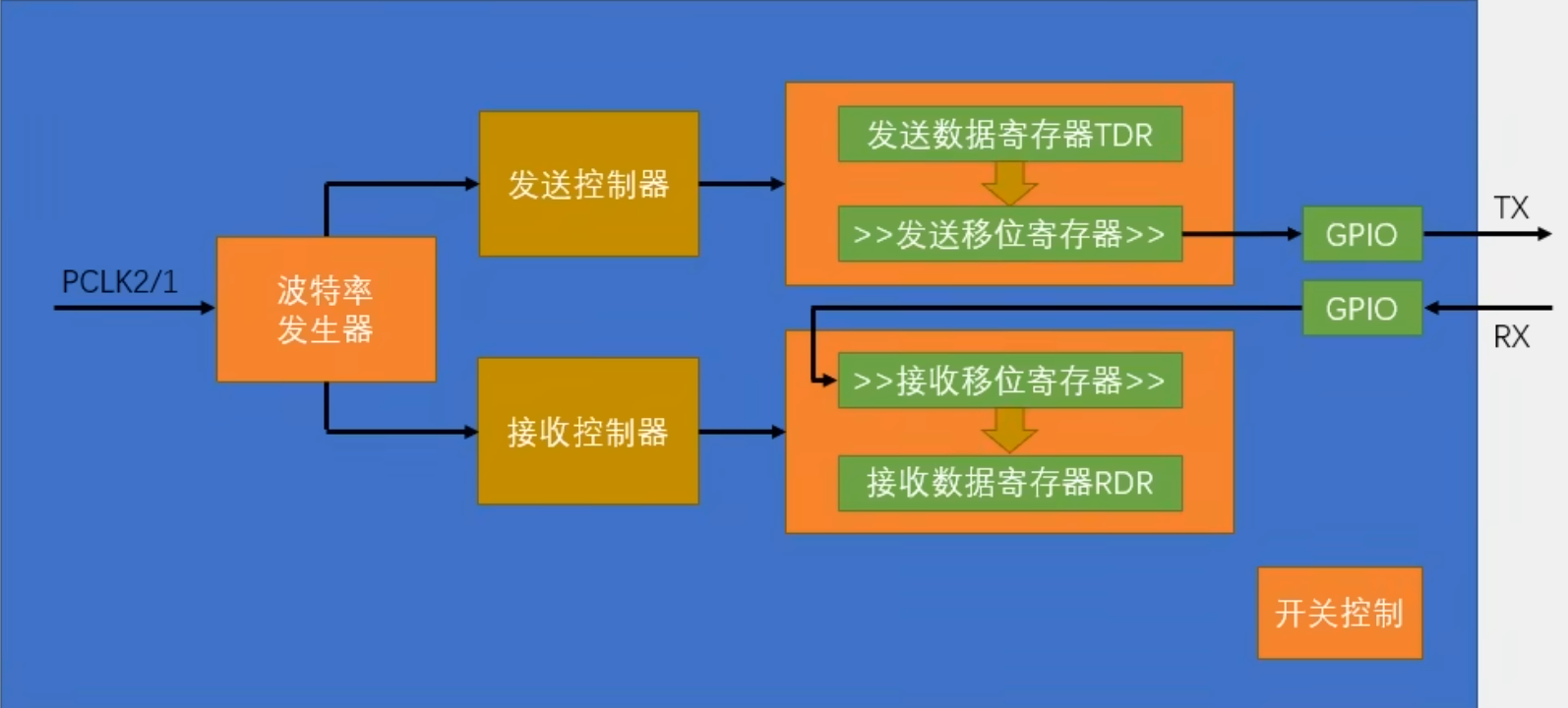
//待机控制器返回信息,则交互成功USART 串口通信
- 电路连接:两个设备的 TX 和 RX 引脚要交叉连接
- 可配置:
- 波特率配置:,软件通过配置 DIV 来设定波特率,PCLK 的时钟一般为 72MHz
- 数据位长度(8/9),奇偶位长度(0.5/1/1.5/2)
- 可选校验位(无校验/奇偶校验)
- 一般来说选了无校验,就选 8 个校验位,因为一个字节对应 8 位;选了奇偶校验,就选 9 个校验位(一个字节+一个校验位)
配置方法
- 打开串口 USART 和 GPIO 口时钟
- GPIO 初始化,TX 引脚选择推挽输出模式,RX 引脚选择输入模式
- USART 初始化,使用结构体
USART_InitTypeDef配置USART_BaudRate可以直接写波特率,库函数里会计算 DIV 并且写进 BRR 寄存器USART_Mode选择串口工作模式,如果既需要发送,又需要接收,就写USART_RX | USART_TXUSART_Parity选择奇偶校验
- 配置相关中断
USART_ITConfig()(若有需要,可选) USART_Cmd()开关控制
一般最常选的是 8 数据位,None 无校验,1 位停止位,人称8N1
- 发送数据和接收数据直接调用库函数
USART_SendData()和USART_ReceiveData()就行- 注意发送完数据要读取 TXE 寄存器标志位,等待数据发送完成,再进行下一次操作
void Serial_SendByte(uint8_t Byte){
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); // 等待发送完成
}- 读取发送和接收状态->读取对应寄存器的标志位
看门狗
- 独立看门狗(IWDG):独立时钟,对时间精度要求低
- 窗口看门狗(WWDG):要求看门狗在精确计时窗口起作用
看门狗可以监控程序的运行状态,当程序因为设计漏洞、硬件故障、电磁干扰等原因,出现卡死或跑飞现象时,看门狗能及时复位程序,避免程序陷入长时间罢工状态。本质上是一个定时器,当指定时间范围内,程序没有执行喂狗(重置计数器)时,看门狗硬件电路就自动产生复位信号。
DMA 转运
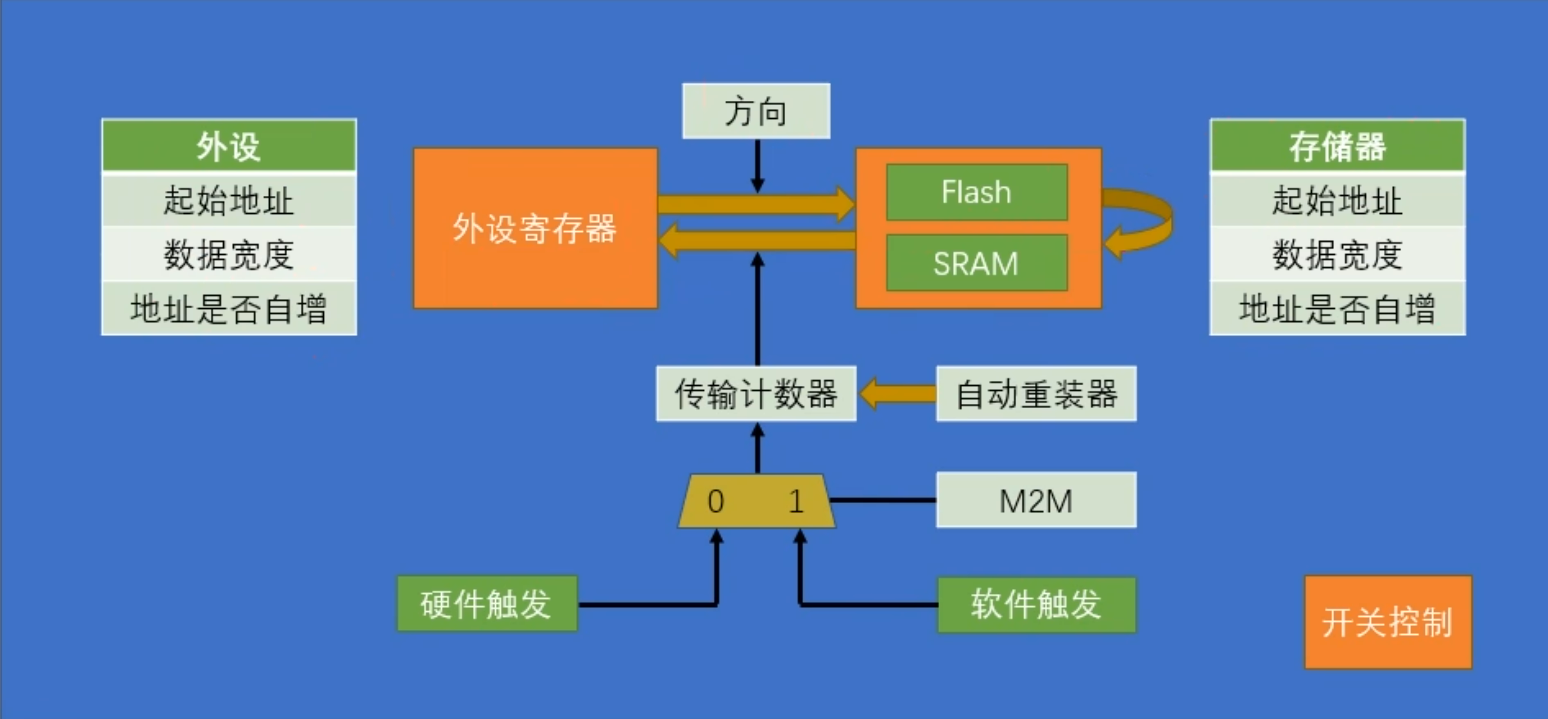
M2M置 1 为软件触发,一般用于存储器与存储器之间的转运,要求尽可能快地转运完;置 0 为硬件触发,一般用于外设与存储器的转运,在硬件达到某个时机时进行转运。- 外设和存储器站点各有三个参数进行配置,包括
起始地址数据宽度地址是否自增,再由方向参数指定转运方向。这里两个站点的配置不一定是外设到存储器,也可以从存储器到存储器,取决于两个站点的初始地址配置在哪,可以不用纠结“外设”和“存储器”,理解为两个 AB 站点的配置就可以,很宽泛的。
- 传输计数器是一个自减计数器。如果自减计数器已经减到 0,想再写一个数进去,此时需要先关闭 DMA 使能,再写传输计数器,最后再打开 DMA 使能。
PID 倒立摆控制项目
电机定速控制
- PID 控制的输出是 PWM,可以看作是驱动力大小;调控量可以是位置/速度。如果是速度,要注意,PWM 的极性和编码器极性相符,否则会导致 PID 进入正反馈,电机在受到一点扰动后直接以最高速旋转。出现正反馈时要考虑是不是极性问题。
- PID 控制的输出量要进行一定限幅,限幅范围取决于输出量的物理含义,比如 PWM 就限幅在-100~100
- PID 三个参数的取值范围,取决于
输入值范围/输出值范围,每个项目不一样,要针对性考虑。 - PID 调参顺序一般是 P、I、D。
- 在调参的时候,刚开始设置 Ki 的值是 0,所以需要对累积误差做出规定,只有当 Ki 不等于 0,也就是存在积分调控的时候,才累计计算误差。否则,如果程序进行了很长时间都没有 Ki 输入,这个时候误差累计很大了,再突然给 Ki 值,就会存在一个突然的输出,容易崩坏硬件。
- 在突然加载或减载的过程中,会使得 PID 输出有个向上过冲或者向下过冲的尖峰,这个是闭环控制的普遍现象。可以考虑加入微分项解决。
- 增量式 PID 只改,所以如果调控过程中,让 KpKiKd 都等于 0,这个时候再更改 target 的值,不会使电机再跟踪目标值,也就是说这个时候电机转化为手动控制!而增量式的好处在于:能够平滑地使电机从手动控制转为自动控制。且增量式不会受到积分饱和的影响。
电机定位置控制
- 定位置控制的稳态误差很小,因为输出值为 0 时,电机位置不会自发的偏移,但是速度会因为摩擦而下降,所以定速控制有稳态误差,定位置控制很小。这个稳态误差的来源是,因为电机在力很小的时候,会由于摩擦导致转动不起来。所以稳态误差有两类:1. 输出值为 0 时,系统实际测量值的自发偏移;2. 输出值很小时,无法对系统实际测量值造成影响。
- 增量式做定位置控制时,会引入历史信息。一旦历史上有噪声,单纯的比例控制就无法恢复这个误差,需要引入积分项,是增量式的缺陷所在。
积分分离
出现现象:定位置控制时,如果加入 I 项,会出现超调;但是定速度控制,加入 I 项波形很完美。
原因;定位置控制,保持位置恒定,不需要有输出力,I 项在逼近目标值积累的误差,需要用超调来抵消;而定速控制,保持速度恒定,需要持续输出力,I 项在逼近目标值积累的误差产生的力,和需要抵抗的摩擦力抵消了。
- 积分分离实现思路:对误差大小进行判断,如果误差绝对值小于指定阀值,则加入积分项作用,反之,则直接将误差积分清零或不加入积分项作用
倒立摆双环 PID 控制
- 双环的调控周期,一般是外环的调控周期>=内环的调控周期
- 双环的核心:外环的输出是内环的目标值。
- 调参:因为内环可以独立工作,所以要先把内环参数调好,再调整外环。